

The gantry has a rectangular working area similar to that of two Scara robots, and larger than that of a delta kinematic robot. Festo points out that delta robots can only operate in circular areas, while Scara robots handle only kidney-shaped ones. It suggests that this makes the planar surface gantry more economical both in terms of its mass – around 150kg – and space requirements.
The gantry has a low centre of gravity and a simpler frame than high-speed parallel kinematic systems. It operates at speeds of up to 5m/s and acceleration rates of up to 50m/s², and can perform 100 picks per minute. It can place objects weighing up to 4kg to an accuracy of 0.1mm during suction pick-up and gripping operations.
The gantry is driven by two static servomotors via a single recirculating toothed belt. The motors do not move in the X/Y plane, allowing fast, dynamic movements with low wear.
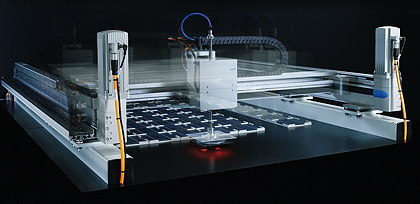
Festo claims that its EXCH gantry system is more economical than Scara or delta robot systems
The gantry can be ordered using one part number and comes with a ready-to-install control package including an axis controller, 3D motion controller and safety functions.