

The AX8000 drives are already characterised by high dynamics and short cycle times. The motor current is scanned in cycles measured in microseconds, while the minimum adjustable EtherCat cycle time is 62.5μs. New setpoint values can be transferred to the servodrive every 62.5μs from a motion controller running in an industrial PC. Beckhoff says that comparable control systems usually operate with cycle times of around 1ms.
The oversampling technology – already familiar from Beckhoff’s EtherCat I/Os – will allow, for example, charts in the TwinCat Scope View software to be resolved even more finely.
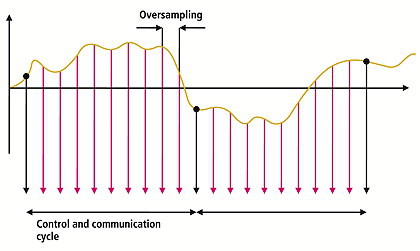
Beckhoff’s AX8000 multi-axis servo systems now support the oversampling technology familiar from its EtherCat terminals.
Synchronisation with other drives – with or without oversampling functions – is possible via EtherCat’s distributed clocks function. The oversampling function can be used in precision machines and systems where high-resolution measured values need to be evaluated.