

“A second-order look-ahead trajectory generation algorithm, which only places limits on velocity and acceleration, can result in significant jerk and vibration in the system, reducing the throughput of the equipment,” explains ACS general manager, Jason Goerges. “The more advanced third-order look-ahead trajectory generation, which limits jerk, provides much smoother motion and reduces vibration.”
The algorithm, which can be implemented on any ACS motion controller, sets maximum velocity and acceleration limits for each axis, according to stage parameters, and allows users to optimise the maximum jerk. Any parameter can be changed on-the-fly during motion for further optimisation.
The algorithm constructs an optimally smooth, multi-axis trajectory through a user-defined path, based on independent axis parameters.
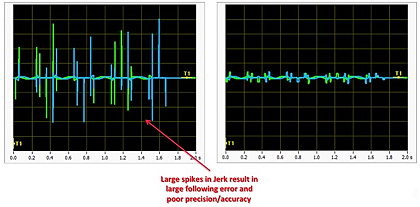
An axis jerk-vs-time plot for a laser-cutting application, showing the results for standard second-order look-ahead (left) and the advanced third-order look-ahead algorithm (right) . The blue traces represent the x-axis, and the green traces the y-axis.
The algorithm is aimed at precision motion control applications such as laser cutting of smartphone PCBs and glass, LED/OLED inkjet printing, semiconductor wafer scribing, automated fluid dispensing, and additive/3D printing.