

At IMTS, the Versaball will demonstrated on the stand of the Danish robot-maker, Universal Robots, where it will pick-and-place four very different objects (shown above), including a steel gear and a billiard ball.
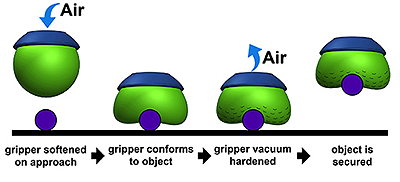
The Versaball’s squishy membrane is filled with loose sub-millimetre particles. Using a process known as “granular jamming”, air is sucked rapidly out of the ball, vacuum-packing the particles and hardening the gripper around an object to hold and lift it. The gripper adapts itself a wide range of object shapes and sizes and can grip objects with rough surfaces that would cause problems for suction-cup grippers. When the ball is re-inflated, it releases the object.
Traditionally, robot integrators have devoted considerable effort to designing specialised grippers for particular tasks. To achieve agile manufacturing — typically involving a low-volume, high-mix series of tasks — frequent reprogramming and retooling is needed. Often, expensive mechanical, vacuum, and magnetic grippers have to be combined to form complex end-of-arm tools that are specific to an application and are not easy to adapt or re-use.
Empire Robotics says that its Versaball works out-of-the-box, and adapts easily to a variety of tasks. In a matter of minutes, with minimal engineering time and effort, the gripper can be programmed or reprogrammed to pick-and-place parts that vary in size and shape, or are presented randomly on a conveyor.
The IMTS demonstration will show how a Versaball attached to a UR robot arm can be used for collaborative applications, working safely alongside humans.
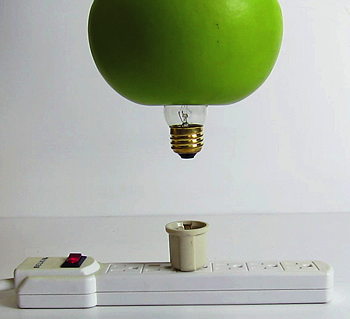
The Versaball can safely lift delicate objects such as light bulbs
Ed Mullen, UR’s national sales manager in North America, describes the Versaball as “one of the most unique new gripper technologies on the market.
“We foresee the Versaball gripper as having the same, positive impact on collaborative robotics as our robot arm has had,” he adds. “The fact that the gripper is soft between grips and can be deployed on-the-fly further extends the safety and flexibility benefits of our robot arms.”
Empire Robotics was founded in 2012 as a spinout from Cornell University. It is run by a team of researchers and engineers who are experts in soft robotics and the phase transitions of granular materials.
The IMTS demonstration marks the commercial launch of the Versaball technology following extensive industry testing of a research kit that has been available since January 2014. Empire says that the gripper has demonstrated 8,000 cycles of operation without dropping an object. The commercial versions come in 3.5in (89mm) and 6.5in (165mm) models that use the same pneumatic base.
Empire Robotics’ president Bill Culley says that the Versaball “complements the flexibility of [Universal Robots’] UR5 and UR10 robots with an end-of-arm gripping solution that has minimal impact on the bottom line and shrinks time between product cycles, pushing robotics into small- and medium-sized manufacturing facilities.”