Related articles:

Flying microrobot can manipulate tiny objects
Published: 05 June, 2009
A team of Canadian researchers claims to have developed the world`s first flying microrobot, capable of manipulating objects in miniature applications such as assembling tiny mechanical components or microsurgery.
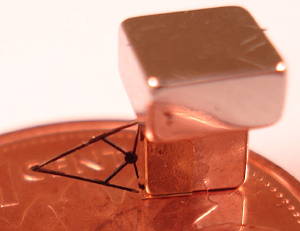
The robot (above) uses magnetic levitation to move itself in three-dimensional space. An external magnetic drive positions the microrobot (which is itself magnetic) by controlling a magnetic field created by an array of electromagnets, using feedback from laser position sensors and a camera. When the robot is carrying an object, the control system compensates automatically to keep it in position.
Because the power is supplied externally, the robot does not need to carry a power source or a controller. This, combined with the absence of mechanical components as connecting arms or wires, makes it extremely manoeuvrable.
The robot can position itself easily on complex surfaces – a key advantage over crawling or walking robots. And, because it can fly, it avoids friction and adhesion forces. If required, it can operate in a closed environment.
As it moves around, the robot can manipulate objects using magnets attached to microgrippers, controlled remotely by a laser beam. The grippers open when heated by the laser, and close when the beam is turned off and they cool down. The robot can move and position tiny objects at scales that would be too small to for manipulation by humans.
"We are the first in the world to make such a floating robot equipped with microgrippers,” says Professor Behrad Khamesee, director of the University of Waterloo’s `s Maglev Microrobotics Laboratory, who leads the team that built the prototype flying robot.
“It can enter almost any space and can be operated in a sealed enclosure by a person outside, which makes it useful for handling biohazardous materials or working in vacuum chambers and clean rooms,” he adds.
Related articles: